Слежка с небес: как уличная 5G-вышка помогает дронам

Обнаружение дронов в городской среде — дорогостоящая задача. Специализированные радарные установки экономически нецелесообразны для массового развертывания, камеры имеют ограниченную дальность и плохо работают ночью, а системы LiDAR сталкиваются с той же проблемой высокой стоимости, что и радары. Группа исследователей из Научно-технического университета Китая в течение последнего года работала над альтернативным решением: использовать для этой цели уже развернутые базовые станции 5G-Advanced.
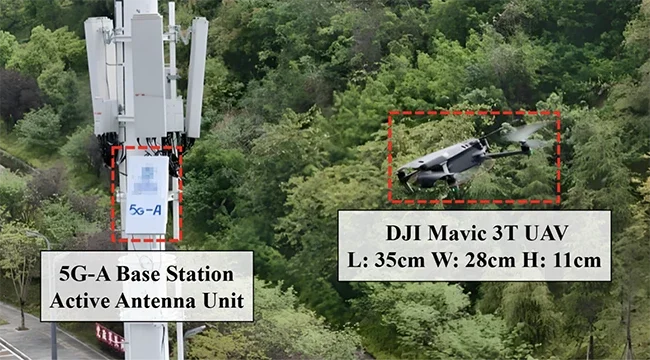
Активная антенная единица (AAU) базовой станции 5G-A и БПЛА, использованные в полевых испытаниях (Источник: Научная статья)
Результатом стала система BSense, протестированная на действующей базовой станции Huawei 5G-A в Шанхае. Станция работает на частоте 4,9 ГГц с полосой пропускания 100 МГц и 128 антенными каналами. Она установлена на высоте 23 метра и охватывает зону обнаружения до 1000 метров, с горизонтальным углом обзора 130 градусов и вертикальным — 45 градусов. Окружающая территория включает жилые здания, заводы, эстакады и реку.
Исследователи запускали дрон DJI Mavic 3T по 25 заранее заданным маршрутам в течение семи дней, создав 54 тестовых сценария и собрав примерно 155 минут данных, что соответствует более чем 14 000 кадрам.
Проблема шума
Базовые станции 5G-A с функцией интегрированного зондирования и связи (ISAC) формируют облака точек окружающего пространства — побочный продукт их сигнального тракта. Теоретически эти облака точек содержат всё, что "видит" антенна, включая дроны. На практике же большая их часть представляет собой шум.
Шум возникает из трёх основных источников. Здания, деревья и другие стационарные объекты отражают сигналы обратно к антенне, а небольшие физические вибрации в сочетании с явлением, называемым утечкой Доплера, могут создавать видимость движения этих отражений. Движущиеся транспортные средства порождают многоуровневые "сигналы-призраки", когда их отражения рикошетят от фасадов зданий. Боковые лепестки диаграммы направленности антенны генерируют дополнительные ложные обнаружения в неверных местах.
В типичном кадре данных лишь одна точка соответствует дрону. Остальные 174 — это шум. Что важнее, эти шумовые точки не так просто отфильтровать. Их доплеровская скорость, отношение сигнал/шум, мощность сигнала и другие измеряемые параметры в значительной степени пересекаются с параметрами реального отражения от дрона. Стандартные фильтры, основанные на пороговых значениях, не могут их разделить.
Предыдущие исследования по обнаружению БПЛА с помощью базовых станций 5G в основном ограничивались моделированием. Единственное известное реальное развертывание до BSense отслеживало морские суда в открытой воде, где цели значительно крупнее, а фоновые помехи минимальны.
Как BSense фильтрует помехи
Система работает в три этапа, каждый из которых передает более чистые данные следующему.
Первый этап использует наблюдение, что фоновый шум в локальном объеме пространства имеет тенденцию группироваться вокруг согласованной статистической сигнатуры. Система разделяет 3D зону обнаружения на кубы со стороной 40 метров и моделирует шум внутри каждого куба как многомерное гауссово распределение. Точки, которые близко соответствуют локальной модели шума, удаляются. Модели требуется около 10 минут данных, содержащих только шум, для инициализации, и она автоматически обновляется по регулярному расписанию.
Второй этап применяет проверки на основе движения. Реальный дрон движется непрерывно, поэтому у него должна быть соответствующая позиция в предыдущем кадре, а его доплеровская скорость должна совпадать со смещением, вычисленным между кадрами. Ложные точки от многолучевых отражений от транспортных средств часто не проходят обе проверки. Система накапливает оценки согласованности во времени, чтобы избежать ошибок из-за шума измерений в отдельном кадре.
Третий этап — это легкая нейронная сеть на основе архитектуры Transformer под названием TrajFormer. Она классифицирует целые траектории, изучая паттерны движения по множеству кадров. Эта сеть снижает количество ложных срабатываний почти до нуля на кадр. Весь конвейер обработки укладывается в интервал между кадрами базовой станции в 640 миллисекунд, работая на стандартном настольном процессоре.
Что показали испытания
BSense точно отслеживал дрон на всех 25 траекториях полета, включая "восьмерки", звездообразные паттерны и прямолинейные пролеты под разными углами. Точность оставалась выше 96% для каждого типа траектории. Средняя ошибка локализации составила 4,9 метра на дистанциях до 1000 метров.
В отдельном тесте два дрона летали одновременно в непосредственной близости. BSense различал и отслеживал оба без путаницы. В кросс-сайтовом тесте на другой базовой станции без перенастройки параметров производительность осталась примерно на том же уровне.
Система также работала в течение 15 минут при отсутствии дронов в воздухе и выдала почти нулевое количество ложных обнаружений.
Два сравниваемых метода давали заметное количество ложных срабатываний и фрагментировали траектории в тех же случаях, где BSense отслеживал без перерывов. Конвейер без какой-либо фильтрации шума оказался практически непригодным, что наглядно демонстрирует объём работы, выполняемой тремя этапами подавления помех.
Области для улучшения
Система создаёт разрывы в траекториях при сложных маршрутах полёта. На трассах в форме знака бесконечности, буквы M и звезды дрон периодически полностью исчезал из облака точек на участках от 50 до 100 метров. Исследователи связывают это с экранированием сигнала высокими зданиями и с направлениями полёта, тангенциальными по отношению к базовой станции. Эти пробелы не являются ошибками фильтрации; дрон попросту не создавал обнаруживаемого отражённого сигнала в эти периоды.
Ошибка локализации возрастает с увеличением дистанции. На расстояниях свыше 700 метров средняя погрешность приближается к 6,5 метрам. Исследователи отмечают, что это связано с шумом измерений в выходных данных облака точек базовой станции, а не с алгоритмами BSense, и что более высокая пропускная способность или увеличенная антенная решётка могли бы снизить эту погрешность.
Тестовые дроны летали по заранее запланированным маршрутам на известных высотах и скоростях. В статье не оценивается, как BSense справляется с дроном, которым управляют с целью избежать обнаружения. Оператор, понимающий, что система полагается на согласованность доплеровской скорости и пространственную непрерывность, потенциально мог бы использовать эти допущения, хотя подобные испытания не проводились.
Более широкий контекст
Базовые станции 5G-A с функцией ISAC внедряются повсеместно в рамках развёртывания технологий 5G-Advanced. BSense показывает, что данные зондирования, которые эти станции уже генерируют, могут использоваться для обнаружения дронов без дополнительного оборудования. Та же инфраструктура базовых станций, что обеспечивает мобильную связь, становится пассивной сенсорной сетью, покрывающей воздушное пространство над городом.
Это имеет прямые применения для безопасности воздушного пространства вокруг объектов критической инфраструктуры и поднимает вопросы о том, что ещё может обнаруживать та же инфраструктура и как будут регулироваться эти возможности.

Скачать: Обзор угроз и средств защиты идентификации SANS 2026